JavaScript is disabled for your browser. Some features of this site may not work without it.
Articulos(INAUT): Últimas incorporaciones
Mostrando ítems 81-100 de 141
-
 (Elsevier Science Inc, 2018-09)
(Elsevier Science Inc, 2018-09) -
 (Wiley VCH Verlag, 2018-03)
(Wiley VCH Verlag, 2018-03) -
 (2019-03-26) Director: ; Codirector:
(2019-03-26) Director: ; Codirector: -
 (American Chemical Society, 2017-05)
(American Chemical Society, 2017-05) -
 (Universidad Politécnica de Quito, 2017-01)
(Universidad Politécnica de Quito, 2017-01) -
 (Springer, 2017-02)
(Springer, 2017-02) -
 (Sociedad Argentina de Bioingeniería, 2017-02)
(Sociedad Argentina de Bioingeniería, 2017-02) -
 (Cambridge University Press, 2018-01)
(Cambridge University Press, 2018-01) -
 Artículo Generating sound stimuli with given emergence level and low frequency content by mixing recordings(S Hirzel Verlag, 2017-09)
Artículo Generating sound stimuli with given emergence level and low frequency content by mixing recordings(S Hirzel Verlag, 2017-09) -
 (Wiley, 2017-05)
(Wiley, 2017-05) -
 (Institute of Electrical and Electronics Engineers, 2017-07)
(Institute of Electrical and Electronics Engineers, 2017-07) -
 (Springer, 2017-10)
(Springer, 2017-10) -
 (Springer, 2018-06)
(Springer, 2018-06) -
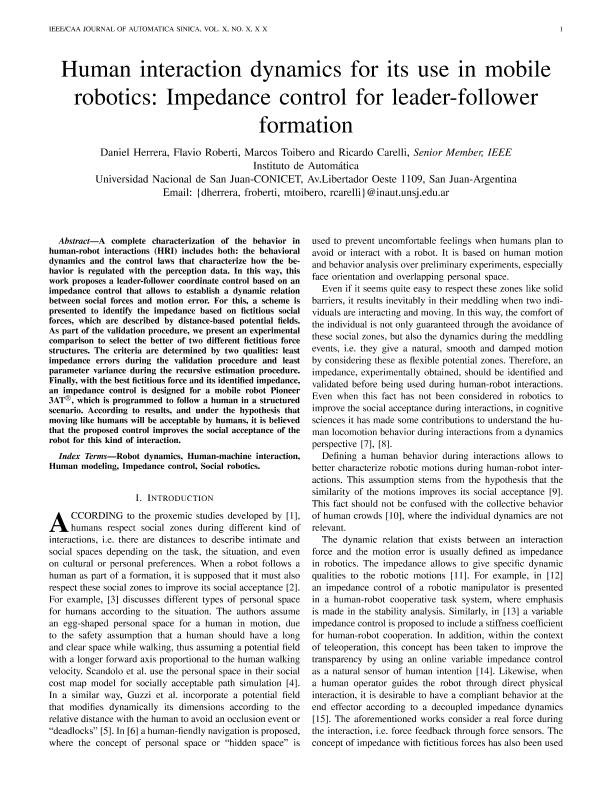 (Institute of Electrical and Electronics Engineers, 2017-10)
(Institute of Electrical and Electronics Engineers, 2017-10) -
 (Elsevier Science Inc, 2017-11)
(Elsevier Science Inc, 2017-11) -
 (Springer Verlag Berlín, 2017-01)
(Springer Verlag Berlín, 2017-01) -
 (Pergamon-Elsevier Science Ltd, 2017-04)
(Pergamon-Elsevier Science Ltd, 2017-04) -
 (Hindawi Publishing Corporation, 2017-10)
(Hindawi Publishing Corporation, 2017-10) -
 (Springer, 2016-12)
(Springer, 2016-12) -
 (Taylor & Francis Ltd, 2016-08)
(Taylor & Francis Ltd, 2016-08)
Mostrando ítems 81-100 de 141