Mostrar el registro sencillo del ítem
dc.contributor.author
Kelly, Rafaël
dc.contributor.author
Carelli Albarracin, Ricardo Oscar
dc.contributor.author
Nasisi, Oscar Herminio
dc.contributor.author
Kuchen, Benjamin Rafael
dc.contributor.author
Reyes, Fernando
dc.date.available
2019-03-15T14:08:51Z
dc.date.issued
2000-12
dc.identifier.citation
Kelly, Rafaël; Carelli Albarracin, Ricardo Oscar; Nasisi, Oscar Herminio; Kuchen, Benjamin Rafael; Reyes, Fernando; Stable visual servoing of camera-in-hand robotic systems; Institute of Electrical and Electronics Engineers; IEEE/ASME Transactions on Mechatronics; 5; 1; 12-2000; 39-48
dc.identifier.issn
1083-4435
dc.identifier.uri
http://hdl.handle.net/11336/71742
dc.description.abstract
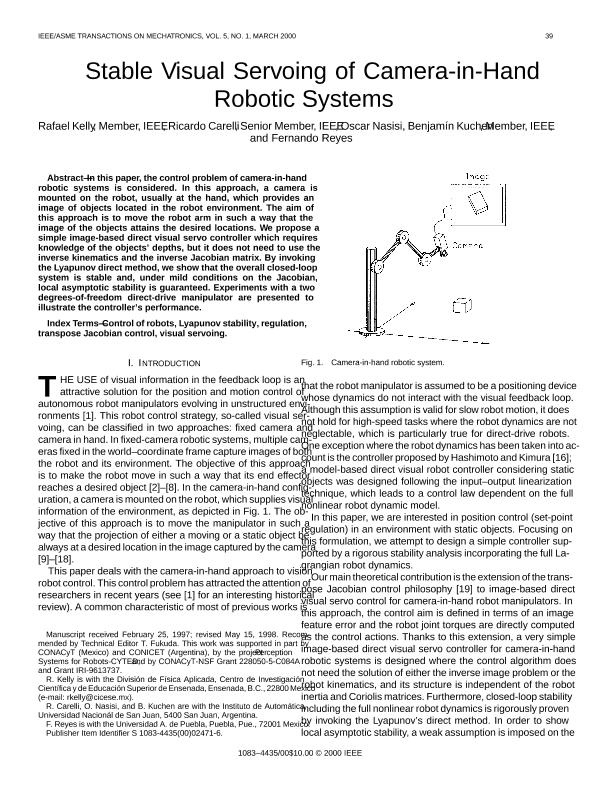
In this paper, the control problem of camera-in-hand robotic systems is considered. In this approach, a camera is mounted on the robot, usually at the hand, which provides an image of objects located in the robot environment. The aim of this approach is to move the robot arm in such a way that the image of the objects attains the desired locations. We propose a simple image-based direct visual servo controller which requires knowledge of the objects' depths, but it does not need to use the inverse kinematics and the inverse Jacobian matrix. By invoking the Lyapunov direct method, we show that the overall closed-loop system is stable and, under mild conditions on the Jacobian, local asymptotic stability is guaranteed. Experiments with a two degrees-of-freedom direct-drive manipulator are presented to illustrate the controller's performance.
dc.format
application/pdf
dc.language.iso
eng
dc.publisher
Institute of Electrical and Electronics Engineers
dc.rights
info:eu-repo/semantics/openAccess
dc.rights.uri
https://creativecommons.org/licenses/by-nc-sa/2.5/ar/
dc.subject.classification
Ingeniería de Sistemas y Comunicaciones
dc.subject.classification
Ingeniería Eléctrica, Ingeniería Electrónica e Ingeniería de la Información
dc.subject.classification
INGENIERÍAS Y TECNOLOGÍAS
dc.title
Stable visual servoing of camera-in-hand robotic systems
dc.type
info:eu-repo/semantics/article
dc.type
info:ar-repo/semantics/artículo
dc.type
info:eu-repo/semantics/publishedVersion
dc.date.updated
2019-03-14T14:08:32Z
dc.journal.volume
5
dc.journal.number
1
dc.journal.pagination
39-48
dc.journal.pais
Estados Unidos
dc.journal.ciudad
Nueva York
dc.description.fil
Fil: Kelly, Rafaël. Centro de Investigacion Cientifica y de Educacion Superior de Ensenada; México
dc.description.fil
Fil: Carelli Albarracin, Ricardo Oscar. Consejo Nacional de Investigaciones Científicas y Técnicas. Centro Científico Tecnológico Conicet - San Juan. Instituto de Automática. Universidad Nacional de San Juan. Facultad de Ingeniería. Instituto de Automática; Argentina
dc.description.fil
Fil: Nasisi, Oscar Herminio. Universidad Nacional de San Juan. Facultad de Ingeniería. Instituto de Automática; Argentina
dc.description.fil
Fil: Kuchen, Benjamin Rafael. Consejo Nacional de Investigaciones Científicas y Técnicas. Centro Científico Tecnológico Conicet - San Juan. Instituto de Automática. Universidad Nacional de San Juan. Facultad de Ingeniería. Instituto de Automática; Argentina
dc.description.fil
Fil: Reyes, Fernando. Benemérita Universidad Autónoma de Puebla; México
dc.journal.title
IEEE/ASME Transactions on Mechatronics
dc.relation.alternativeid
info:eu-repo/semantics/altIdentifier/url/https://ieeexplore.ieee.org/document/828588
dc.relation.alternativeid
info:eu-repo/semantics/altIdentifier/doi/https://dx.doi.org/10.1109/3516.828588
Archivos asociados
Tamaño:
287.3Kb
Formato:
PDF