Artículo
Stable visual servoing of camera-in-hand robotic systems
Kelly, Rafaël; Carelli Albarracin, Ricardo Oscar ; Nasisi, Oscar Herminio; Kuchen, Benjamin Rafael
; Reyes, Fernando
; Nasisi, Oscar Herminio; Kuchen, Benjamin Rafael
; Reyes, Fernando
; Nasisi, Oscar Herminio; Kuchen, Benjamin Rafael
; Reyes, Fernando
Fecha de publicación:
12/2000
Editorial:
Institute of Electrical and Electronics Engineers
Revista:
IEEE/ASME Transactions on Mechatronics
ISSN:
1083-4435
Idioma:
Inglés
Tipo de recurso:
Artículo publicado
Clasificación temática:
Resumen
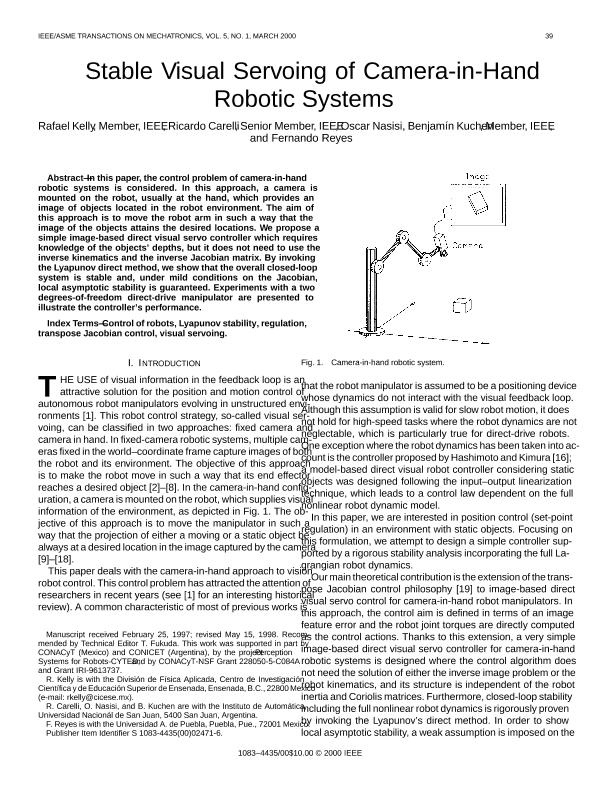
In this paper, the control problem of camera-in-hand robotic systems is considered. In this approach, a camera is mounted on the robot, usually at the hand, which provides an image of objects located in the robot environment. The aim of this approach is to move the robot arm in such a way that the image of the objects attains the desired locations. We propose a simple image-based direct visual servo controller which requires knowledge of the objects' depths, but it does not need to use the inverse kinematics and the inverse Jacobian matrix. By invoking the Lyapunov direct method, we show that the overall closed-loop system is stable and, under mild conditions on the Jacobian, local asymptotic stability is guaranteed. Experiments with a two degrees-of-freedom direct-drive manipulator are presented to illustrate the controller's performance.
Archivos asociados
Tamaño:
287.3Kb
Formato:
PDF
Licencia
 Excepto donde se diga explícitamente, este item se publica bajo la siguiente descripción:
Creative Commons Attribution-NonCommercial-ShareAlike 2.5 Unported (CC BY-NC-SA 2.5)
Excepto donde se diga explícitamente, este item se publica bajo la siguiente descripción:
Creative Commons Attribution-NonCommercial-ShareAlike 2.5 Unported (CC BY-NC-SA 2.5)
Identificadores
Colecciones
Articulos(SEDE CENTRAL)
Articulos de SEDE CENTRAL
Articulos de SEDE CENTRAL
Citación
Kelly, Rafaël; Carelli Albarracin, Ricardo Oscar; Nasisi, Oscar Herminio; Kuchen, Benjamin Rafael; Reyes, Fernando; Stable visual servoing of camera-in-hand robotic systems; Institute of Electrical and Electronics Engineers; IEEE/ASME Transactions on Mechatronics; 5; 1; 12-2000; 39-48
Compartir


Altmétricas