Mostrar el registro sencillo del ítem
dc.contributor.author
Penizzotto Bacha, Franco Victor
dc.contributor.author
Slawiñski, Emanuel
dc.contributor.author
Mut, Vicente Antonio
dc.date.available
2018-02-16T13:08:03Z
dc.date.issued
2014-10
dc.identifier.citation
Penizzotto Bacha, Franco Victor; Slawiñski, Emanuel; Mut, Vicente Antonio; Analysis and Experimentation of a Mobile Robot Teleoperation System over Internet; Institute of Electrical and Electronics Engineers; IEEE Latin America Transactions; 12; 7; 10-2014; 1191-1198
dc.identifier.issn
1548-0992
dc.identifier.uri
http://hdl.handle.net/11336/36589
dc.description.abstract
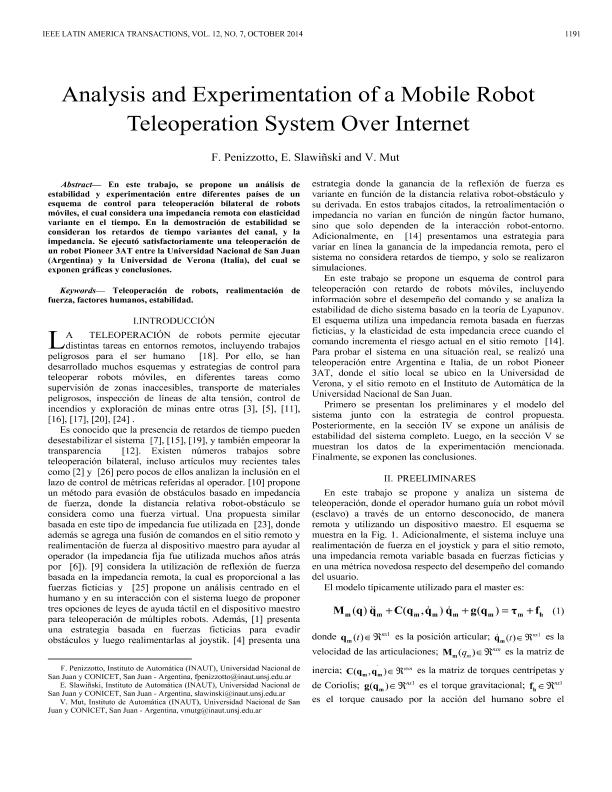
In this paper, stability analysis and experimentation of a control scheme for bilateral teleoperation of mobile robots, which considers a remote variant-gain impedance is proposed. The analysis considers variant channel time delays and the impedance. For the experiment, an intercontinental teleoperation of a Pioneer 3AT was successfully performed between the National University of San Juan (Argentina) and the University of Verona (Italy), from which results, graphics and conclusions are exposed.
dc.format
application/pdf
dc.language.iso
eng
dc.publisher
Institute of Electrical and Electronics Engineers
dc.rights
info:eu-repo/semantics/openAccess
dc.rights.uri
https://creativecommons.org/licenses/by-nc-sa/2.5/ar/
dc.subject
Force Feedback:Human Factors
dc.subject
Robot Teleoperation
dc.subject
Stability
dc.subject.classification
Ingeniería de Sistemas y Comunicaciones
dc.subject.classification
Ingeniería Eléctrica, Ingeniería Electrónica e Ingeniería de la Información
dc.subject.classification
INGENIERÍAS Y TECNOLOGÍAS
dc.title
Analysis and Experimentation of a Mobile Robot Teleoperation System over Internet
dc.type
info:eu-repo/semantics/article
dc.type
info:ar-repo/semantics/artículo
dc.type
info:eu-repo/semantics/publishedVersion
dc.date.updated
2018-02-14T13:20:41Z
dc.journal.volume
12
dc.journal.number
7
dc.journal.pagination
1191-1198
dc.journal.pais
Estados Unidos
dc.journal.ciudad
New York
dc.description.fil
Fil: Penizzotto Bacha, Franco Victor. Consejo Nacional de Investigaciones Científicas y Técnicas. Centro Científico Tecnológico Conicet - San Juan. Instituto de Automática. Universidad Nacional de San Juan. Facultad de Ingeniería. Instituto de Automática; Argentina
dc.description.fil
Fil: Slawiñski, Emanuel. Consejo Nacional de Investigaciones Científicas y Técnicas. Centro Científico Tecnológico Conicet - San Juan. Instituto de Automática. Universidad Nacional de San Juan. Facultad de Ingeniería. Instituto de Automática; Argentina
dc.description.fil
Fil: Mut, Vicente Antonio. Consejo Nacional de Investigaciones Científicas y Técnicas. Centro Científico Tecnológico Conicet - San Juan. Instituto de Automática. Universidad Nacional de San Juan. Facultad de Ingeniería. Instituto de Automática; Argentina
dc.journal.title
IEEE Latin America Transactions
dc.relation.alternativeid
info:eu-repo/semantics/altIdentifier/doi/http://dx.doi.org/10.1109/TLA.2014.6948852
dc.relation.alternativeid
info:eu-repo/semantics/altIdentifier/url/http://ieeexplore.ieee.org/document/6948852/
Archivos asociados
Tamaño:
704.9Kb
Formato:
PDF