Mostrar el registro sencillo del ítem
dc.contributor.author
Herrera Anda, Daniel Esteban
dc.contributor.author
Roberti, Flavio
dc.contributor.author
Toibero, Juan Marcos
dc.contributor.author
Carelli Albarracin, Ricardo Oscar
dc.date.available
2018-09-28T15:52:03Z
dc.date.issued
2016-06
dc.identifier.citation
Herrera Anda, Daniel Esteban; Roberti, Flavio; Toibero, Juan Marcos; Carelli Albarracin, Ricardo Oscar; Human-Robot Interaction: Legible behavior rules in passing and crossing events; Institute of Electrical and Electronics Engineers; IEEE Latin America Transactions; 14; 6; 6-2016; 2644-2650
dc.identifier.uri
http://hdl.handle.net/11336/61225
dc.description.abstract
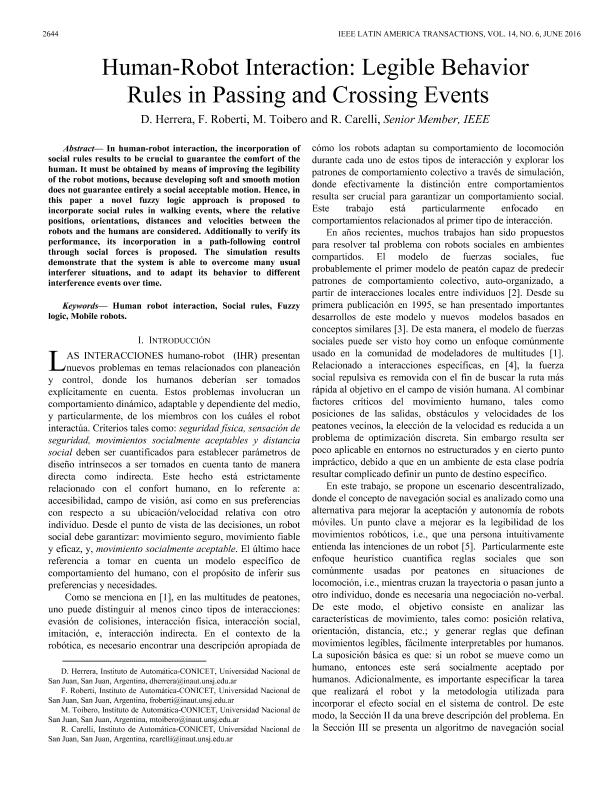
In human-robot interaction, the incorporation of social rules results to be crucial to guarantee the comfort of the human. It must be obtained by means of improving the legibility of the robot motions, because developing soft and smooth motion does not guarantee entirely a social acceptable motion. Hence, in this paper a novel fuzzy logic approach is proposed to incorporate social rules in walking events, where the relative positions, orientations, distances and velocities between the robots and the humans are considered. Additionally to verify its performance, its incorporation in a path-following control through social forces is proposed. The simulation results demonstrate that the system is able to overcome many usual interferer situations, and to adapt its behavior to different interference events over time.
dc.format
application/pdf
dc.language.iso
spa
dc.publisher
Institute of Electrical and Electronics Engineers
dc.rights
info:eu-repo/semantics/openAccess
dc.rights.uri
https://creativecommons.org/licenses/by-nc-sa/2.5/ar/
dc.subject
Fuzzy Logic
dc.subject
Human Robot Interaction
dc.subject
Mobile Robots
dc.subject
Social Rules
dc.subject.classification
Ingeniería de Sistemas y Comunicaciones
dc.subject.classification
Ingeniería Eléctrica, Ingeniería Electrónica e Ingeniería de la Información
dc.subject.classification
INGENIERÍAS Y TECNOLOGÍAS
dc.title
Human-Robot Interaction: Legible behavior rules in passing and crossing events
dc.type
info:eu-repo/semantics/article
dc.type
info:ar-repo/semantics/artículo
dc.type
info:eu-repo/semantics/publishedVersion
dc.date.updated
2018-09-27T20:19:11Z
dc.identifier.eissn
1548-0992
dc.journal.volume
14
dc.journal.number
6
dc.journal.pagination
2644-2650
dc.journal.pais
Estados Unidos
dc.journal.ciudad
Nueva York
dc.description.fil
Fil: Herrera Anda, Daniel Esteban. Consejo Nacional de Investigaciones Científicas y Técnicas. Centro Científico Tecnológico Conicet - San Juan. Instituto de Automática. Universidad Nacional de San Juan. Facultad de Ingeniería. Instituto de Automática; Argentina
dc.description.fil
Fil: Roberti, Flavio. Consejo Nacional de Investigaciones Científicas y Técnicas. Centro Científico Tecnológico Conicet - San Juan. Instituto de Automática. Universidad Nacional de San Juan. Facultad de Ingeniería. Instituto de Automática; Argentina
dc.description.fil
Fil: Toibero, Juan Marcos. Consejo Nacional de Investigaciones Científicas y Técnicas. Centro Científico Tecnológico Conicet - San Juan. Instituto de Automática. Universidad Nacional de San Juan. Facultad de Ingeniería. Instituto de Automática; Argentina
dc.description.fil
Fil: Carelli Albarracin, Ricardo Oscar. Consejo Nacional de Investigaciones Científicas y Técnicas. Centro Científico Tecnológico Conicet - San Juan. Instituto de Automática. Universidad Nacional de San Juan. Facultad de Ingeniería. Instituto de Automática; Argentina
dc.journal.title
IEEE Latin America Transactions
dc.relation.alternativeid
info:eu-repo/semantics/altIdentifier/url/http://ieeexplore.ieee.org/document/7555232/
dc.relation.alternativeid
info:eu-repo/semantics/altIdentifier/doi/http://dx.doi.org/10.1109/TLA.2016.7555232
Archivos asociados
Tamaño:
873.3Kb
Formato:
PDF