Mostrar el registro sencillo del ítem
dc.contributor.author
Penizzotto Bacha, Franco Victor
dc.contributor.author
Slawiñski, Emanuel
dc.contributor.author
Mut, Vicente Antonio
dc.date.available
2016-03-22T17:43:25Z
dc.date.issued
2014-11
dc.identifier.citation
Penizzotto Bacha, Franco Victor; Slawiñski, Emanuel; Mut, Vicente Antonio; Analysis and Experimentation of a Mobile Robot Teleoperation System Over Internet; Institute of Electrical and Electronics Engineers; IEEE Latin America Transactions; 12; 7; 11-2014; 1191-1198
dc.identifier.issn
1548-0992
dc.identifier.uri
http://hdl.handle.net/11336/4907
dc.description.abstract
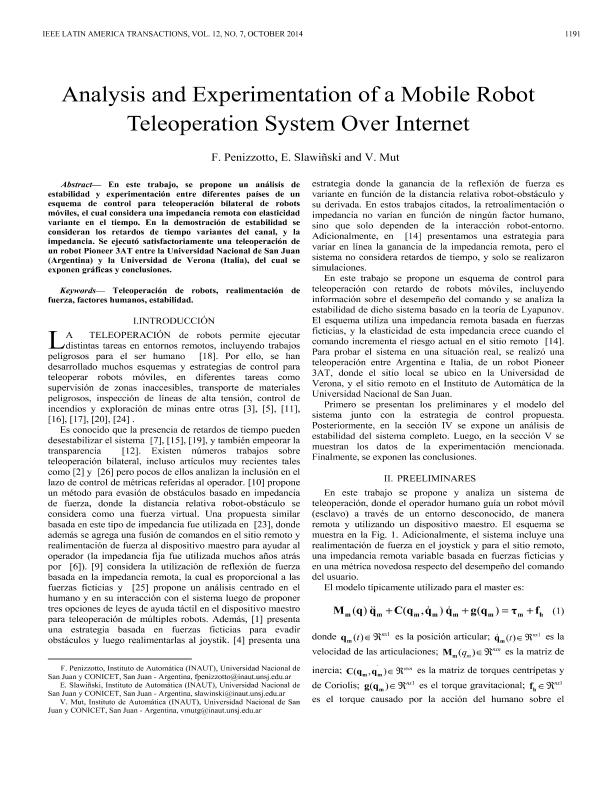
En este trabajo, se propone un análisis de estabilidad y experimentación entre diferentes países de un esquema de control para teleoperación bilateral de robots móviles, el cual considera una impedancia remota con elasticidad variante en el tiempo. En la demostración de estabilidad se consideran los retardos de tiempo variantes del canal, y la impedancia. Se ejecutó satisfactoriamente una teleoperación de un robot Pioneer 3AT entre la Universidad Nacional de San Juan (Argentina) y la Universidad de Verona (Italia), del cual se exponen gráficas y conclusiones.
dc.description.abstract
In this paper, stability analysis and experimentation of a control scheme for bilateral teleoperation of mobile robots, which considers a remote variant-gain impedance is proposed. The analysis considers variant channel time delays and the impedance. For the experiment, an intercontinental teleoperation of a Pioneer 3AT was successfully performed between the National University of San Juan (Argentina) and the University of Verona (Italy), from which results, graphics and conclusions are exposed.
dc.format
application/pdf
dc.language.iso
spa
dc.publisher
Institute of Electrical and Electronics Engineers
dc.rights
info:eu-repo/semantics/openAccess
dc.rights.uri
https://creativecommons.org/licenses/by-nc-sa/2.5/ar/
dc.subject
Teleoperación de Robots
dc.subject
Realimentación de Fuerza
dc.subject
Factores Humanos
dc.subject
Estabilidad
dc.subject.classification
Control Automático y Robótica
dc.subject.classification
Ingeniería Eléctrica, Ingeniería Electrónica e Ingeniería de la Información
dc.subject.classification
INGENIERÍAS Y TECNOLOGÍAS
dc.title
Analysis and Experimentation of a Mobile Robot Teleoperation System Over Internet
dc.type
info:eu-repo/semantics/article
dc.type
info:ar-repo/semantics/artículo
dc.type
info:eu-repo/semantics/publishedVersion
dc.date.updated
2016-03-30 10:35:44.97925-03
dc.journal.volume
12
dc.journal.number
7
dc.journal.pagination
1191-1198
dc.journal.pais
Estados Unidos
dc.journal.ciudad
New York
dc.description.fil
Fil: Penizzotto Bacha, Franco Victor. Consejo Nacional de Investigaciones Científicas y Técnicas. Centro Científico Tecnológico San Juan. Instituto de Automática; Argentina
dc.description.fil
Fil: Slawiñski, Emanuel. Consejo Nacional de Investigaciones Científicas y Técnicas. Centro Científico Tecnológico San Juan. Instituto de Automática; Argentina
dc.description.fil
Fil: Mut, Vicente Antonio. Consejo Nacional de Investigaciones Científicas y Técnicas. Centro Científico Tecnológico San Juan. Instituto de Automática; Argentina
dc.journal.title
IEEE Latin America Transactions
dc.relation.alternativeid
info:eu-repo/semantics/altIdentifier/url/http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=6948852&tag=1
dc.relation.alternativeid
info:eu-repo/semantics/altIdentifier/doi/http://dx.doi.org/10.1109/TLA.2014.6948852
Archivos asociados
Tamaño:
704.9Kb
Formato:
PDF