Mostrar el registro sencillo del ítem
dc.contributor.author
Ait, Ismael
dc.contributor.author
Kofman, Ernesto Javier
dc.contributor.author
Pire, Taihú Aguará Nahuel
dc.date.available
2024-03-26T14:54:53Z
dc.date.issued
2023-04
dc.identifier.citation
Ait, Ismael; Kofman, Ernesto Javier; Pire, Taihú Aguará Nahuel; A Travelling Salesman Problem Approach to Efficiently Navigate Crop Row Fields with a Car-Like Robot; Institute of Electrical and Electronics Engineers; IEEE Latin America Transactions; 21; 5; 4-2023; 643-651
dc.identifier.issn
1548-0992
dc.identifier.uri
http://hdl.handle.net/11336/231597
dc.description.abstract
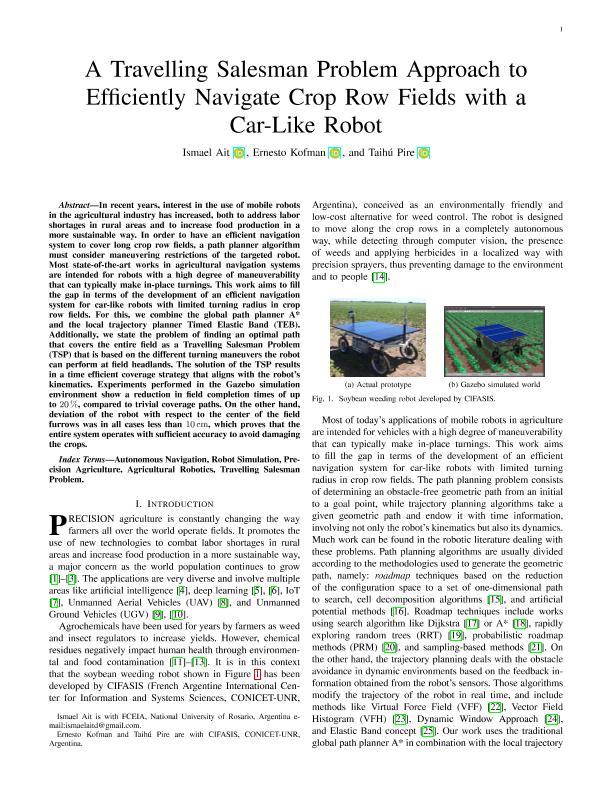
In recent years, interest in the use of mobile robots in the agricultural industry has increased, both to address labor shortages in rural areas and to increase food production in a more sustainable way. In order to have an efficient navigation system to cover long crop row fields, a path planner algorithm must consider maneuvering restrictions of the targeted robot. Most state-of-the-art works in agricultural navigation systems are intended for robots with a high degree of maneuverability that can typically make in-place turnings. This work aims to fill the gap in terms of the development of an efficient navigation system for car-like robots with limited turning radius in crop row fields. For this, we combine the global path planner A* and the local trajectory planner Timed Elastic Band (TEB). Additionally, we state the problem of finding an optimal path that covers the entire field as a Travelling Salesman Problem (TSP) that is based on the different turning maneuvers the robot can perform at field headlands. The solution of the TSP results in a time efficient coverage strategy that aligns with the robot´s kinematics. Experiments performed in the Gazebo simulation environment show a reduction in field completion times of up to 20%, compared to trivial coverage paths. On the other hand, deviation of the robot with respect to the center of the field furrows was in all cases less than 10cm, which proves that the entire system operates with sufficient accuracy to avoid damaging the crops.
dc.format
application/pdf
dc.language.iso
eng
dc.publisher
Institute of Electrical and Electronics Engineers
dc.rights
info:eu-repo/semantics/openAccess
dc.rights.uri
https://creativecommons.org/licenses/by-nc-sa/2.5/ar/
dc.subject
AUTONOMOUS NAVIGATION
dc.subject
ROBOT SIMULATION
dc.subject
PRECISION AGRICULTURE
dc.subject
AGRICULTURAL ROBOTICS
dc.subject
TRAVELLING SALESMAN PROBLEM
dc.subject.classification
Control Automático y Robótica
dc.subject.classification
Ingeniería Eléctrica, Ingeniería Electrónica e Ingeniería de la Información
dc.subject.classification
INGENIERÍAS Y TECNOLOGÍAS
dc.title
A Travelling Salesman Problem Approach to Efficiently Navigate Crop Row Fields with a Car-Like Robot
dc.type
info:eu-repo/semantics/article
dc.type
info:ar-repo/semantics/artículo
dc.type
info:eu-repo/semantics/publishedVersion
dc.date.updated
2024-03-25T11:57:29Z
dc.journal.volume
21
dc.journal.number
5
dc.journal.pagination
643-651
dc.journal.pais
Estados Unidos
dc.journal.ciudad
New York
dc.description.fil
Fil: Ait, Ismael. Universidad Nacional de Rosario; Argentina
dc.description.fil
Fil: Kofman, Ernesto Javier. Consejo Nacional de Investigaciones Científicas y Técnicas. Centro Científico Tecnológico Conicet - Rosario. Centro Internacional Franco Argentino de Ciencias de la Información y de Sistemas. Universidad Nacional de Rosario. Centro Internacional Franco Argentino de Ciencias de la Información y de Sistemas; Argentina
dc.description.fil
Fil: Pire, Taihú Aguará Nahuel. Consejo Nacional de Investigaciones Científicas y Técnicas. Centro Científico Tecnológico Conicet - Rosario. Centro Internacional Franco Argentino de Ciencias de la Información y de Sistemas. Universidad Nacional de Rosario. Centro Internacional Franco Argentino de Ciencias de la Información y de Sistemas; Argentina
dc.journal.title
IEEE Latin America Transactions
dc.relation.alternativeid
info:eu-repo/semantics/altIdentifier/url/https://latamt.ieeer9.org/index.php/transactions/article/view/7751
Archivos asociados
Tamaño:
6.537Mb
Formato:
PDF