Mostrar el registro sencillo del ítem
dc.contributor.author
Auat Cheein, Fernando Alfredo
dc.contributor.author
Carelli Albarracin, Ricardo Oscar
dc.date.available
2016-02-01T17:02:52Z
dc.date.issued
2013-09
dc.identifier.citation
Auat Cheein, Fernando Alfredo; Carelli Albarracin, Ricardo Oscar; Agricultural Robotics: Unmanned Robotic Service Units in Agricultural Tasks; Institute of Electrical and Electronics Engineers; IEEE Industrial Electronics Magazine; 7; 3; 9-2013; 48-58
dc.identifier.issn
1932-4529
dc.identifier.uri
http://hdl.handle.net/11336/3928
dc.description.abstract
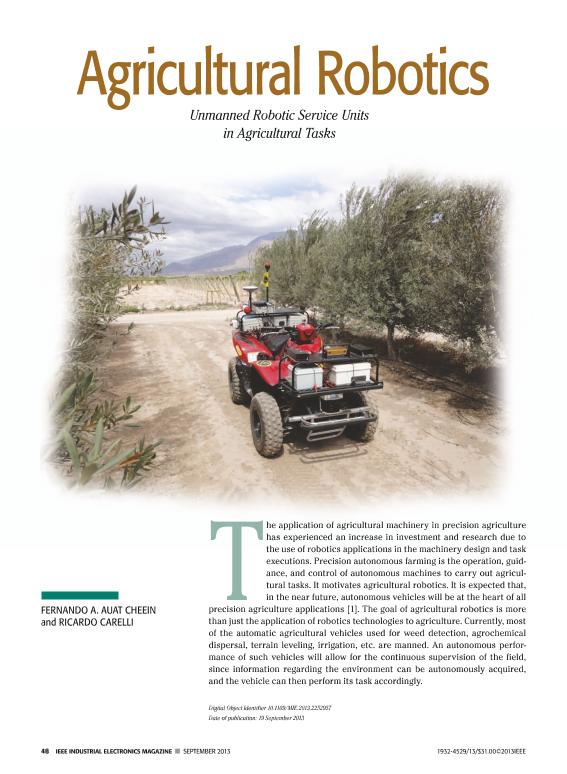
The application of agricultural machinery in precision agriculture has experienced an increase in investment and research due to the use of robotics applications in the machinery design and task executions. Precision autonomous farming is the operation, guidance, and control of autonomous machines to carry out agricultural tasks. It motivates agricultural robotics. It is expected that, in the near future, autonomous vehicles will be at the heart of all precision agriculture applications [1]. The goal of agricultural robotics is more than just the application of robotics technologies to agriculture. Currently, most of the automatic agricultural vehicles used for weed detection, agrochemical dispersal, terrain leveling, irrigation, etc. are manned. An autonomous performance of such vehicles will allow for the continuous supervision of the field, since information regarding the environment can be autonomously acquired, and the vehicle can then perform its task accordingly.
dc.format
application/pdf
dc.language.iso
eng
dc.publisher
Institute of Electrical and Electronics Engineers
dc.rights
info:eu-repo/semantics/openAccess
dc.rights.uri
https://creativecommons.org/licenses/by-nc-sa/2.5/ar/
dc.subject
Robotics
dc.subject
Unmanned Vehicles
dc.subject
Service Units
dc.subject
Agriculture
dc.subject.classification
Control Automático y Robótica
dc.subject.classification
Ingeniería Eléctrica, Ingeniería Electrónica e Ingeniería de la Información
dc.subject.classification
INGENIERÍAS Y TECNOLOGÍAS
dc.title
Agricultural Robotics: Unmanned Robotic Service Units in Agricultural Tasks
dc.type
info:eu-repo/semantics/article
dc.type
info:ar-repo/semantics/artículo
dc.type
info:eu-repo/semantics/publishedVersion
dc.date.updated
2016-03-30 10:35:44.97925-03
dc.journal.volume
7
dc.journal.number
3
dc.journal.pagination
48-58
dc.journal.pais
Estados Unidos
dc.journal.ciudad
New York
dc.description.fil
Fil: Auat Cheein, Fernando Alfredo. Universidad Tecnológica Santa María; Chile
dc.description.fil
Fil: Carelli Albarracin, Ricardo Oscar. Consejo Nacional de Investigaciones Científicas y Técnicas. Centro Científico Tecnológico San Juan. Instituto de Automática; Argentina
dc.journal.title
IEEE Industrial Electronics Magazine
dc.relation.alternativeid
info:eu-repo/semantics/altIdentifier/url/http://ieeexplore.ieee.org/xpl/abstractAuthors.jsp?reload=true&arnumber=6603408
dc.relation.alternativeid
info:eu-repo/semantics/altIdentifier/issn/1932-4529
dc.relation.alternativeid
info:eu-repo/semantics/altIdentifier/doi/http://dx.doi.org/10.1109/MIE.2013.2252957
Archivos asociados
Tamaño:
3.309Mb
Formato:
PDF